Exposé
"Comment un robot domestique retrouve t-il son chemin?"
Principales fonctions

Solutions au déplacement intélligent du robot
- Observation environement:
- Empecher une chute:
- Eviter les obstacle:
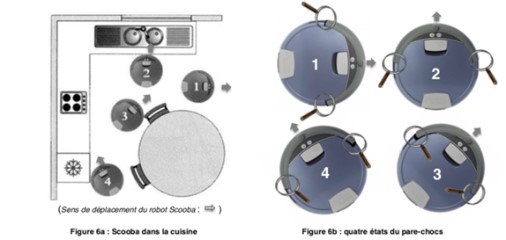
- S'informer d'un choc:
- Retour borne-émetteur borne
- "infra1" le robot doit aller sur la gacuhe.
- "infra2" le robot doit aller sur la droite.
- "infra3" le robot conserve sa trajectoire.
- Utilisation restreinte

La caméra située sur le robot aspirateur lui sert à avoir une première approche de son environement et l'aide à cartographier son espace d'utilisation.Dans le cas présent la caméra est inclinée à 30° pour capter le maximum d'info.Des caméras 360° ont déjà été expérimetées mais elle pourrait être "aveuglées" lorsque l'appareil entre dans une zone baignée par la lumière du soleil.
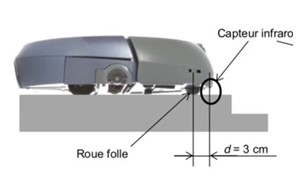
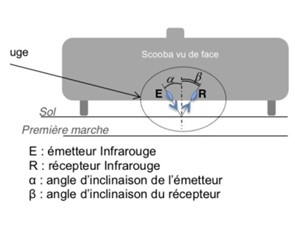
Pour éviter qu'il chute le robot dispose d'un "capteur de chute". Si l'angle d'inclinaison de l'émétteur change à cause d'un dénivelé trop important: comme une marche par exemple, le robot à pour ordre de s'arrêter puis faire demi-tour.

Pour pouvoir anticiper ses déplacements le robot va calculer les distances entre lui et les obstacles et ainsi essayer de ne pas les heurter ou bien les contourner grâce à des capteurs(émetteurs/recepteurs)infrarouges.
Rappel: Les infraroures sont compris entre 750nm (7.5*10^-7m) et 0.1mm (1.0*10^-4m)donc invisible a l'oeil humain.
Le capteur fournit une valeur analogique du voltage en sortie correspondant à cette distance, celle-ci sera rentrée dans un algorithme et le robot essaiera de ne pas foncer dans l’obstacle.
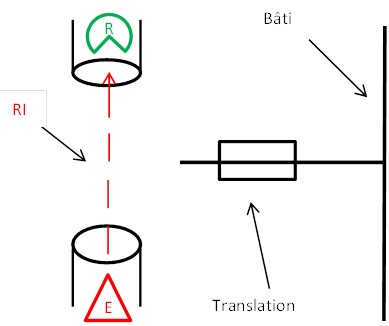
Si le robot heurte quand même un mur ou un objet il faut qu'il en sois informé aussi pour ne pas persister dans sa direction.C'est pouqruoi des capteurs de chocs sont disposés à l'avant du robot.Si le rayon infrarouge est coupé on sais que le pare-choc s'est légerement enfoncé et donc que l'on à heurté quelque chose.

Les robots aspirateurs actuels sont en général capables de retourner à leur borne de chargement.Certain dipose même d'une fonction leur permettant de se recharger si besoin pendant leur cycle et de le reprendre de façon autonome.Pour cela ils ont besoins de savoir où se trouve leur borne.
La borne émet alors des infrarouges:

Capteurs: Sous programme lisant tous les capteurs du robot.
Moteur: Etat du moteur, 1=en marche.
I3,I2,I1: Type d'infrarouges
Cborne:Le robot détecte un couple qui s'applique entre lui et sa borne, tant que Cborne=0 la boucle reprend.


Il est possible de limiter et de décider les zones d"actions du robot grâce à des bandes magnétiques ou des murs virtuels.
Définition bande magnétique:La bande magnétique (ou ruban magnétique) est un support permettant l'enregistrement et la lecture d'informations analogiques ou numériques à l'aide de bandes magnétiques (pour données informatiques).
Le robot dispose donc de capteurs capable de détecter les bandes magnétiques et d'interpréter le signal que renvoie la bande à savoir: ne pas la dépasser.